Chengzhan Gao
高程展|Software Engineer
University of California
Hi! I currently work as software engineer at Ideker Lab, University of California San Diego (UCSD). I hold a Master’s degree in Electrical and Computer Engineering at UCSD. I bring a diverse academic background with a Bachelor’s in Civil Engineering from Tongji University in Shanghai, China. My foray into coding began during my undergraduate years, where interdisciplinary projects piqued my interest in the digital realm. The allure of creating worlds and defining their logic purely through code was irresistible, leading me to pivot towards Computer Engineering.
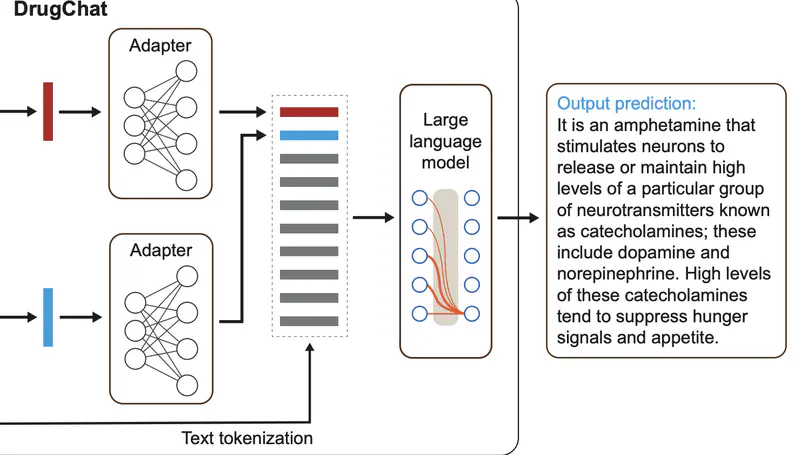
Throughout my career, I’ve collected a wealth of experience in software development. I completed internships as a software engineer at CRIB and Esurgi Biotech. I also collaborated with Professor Xie Pengtao on the LLM-related project DrugChat. My role as a software engineer at Lyde was particularly enriching, where I significantly contributed to the development of the AI-assisted university application tool, FoxiApply.
I am a stickler for perfection and detail. Beyond the technicalities, I firmly believe that software engineering is more than coding and I value communication and teamwork.
- Web Development
- Machine Learning
- Game Development
MSc in Computer Engineering, 2024
University of California, San Diego
BSc in Civil Engineering, 2022
Tongji University
Minor in German, 2019
Tongji University
Skills
Work Experience
- Contributed to the migration of key features from the desktop version of Cytoscape to its web-based counterpart.
- Maintained the NDEx website, resolving various bugs and ensuring optimal performance and reliability.
- Developed a 0 to 1 generative AI-powered platform to help students build their first resume for Ivy League college applications in less than 5 minutes without complex template writing, overseeing all phases from UI/UX design through to deployment.
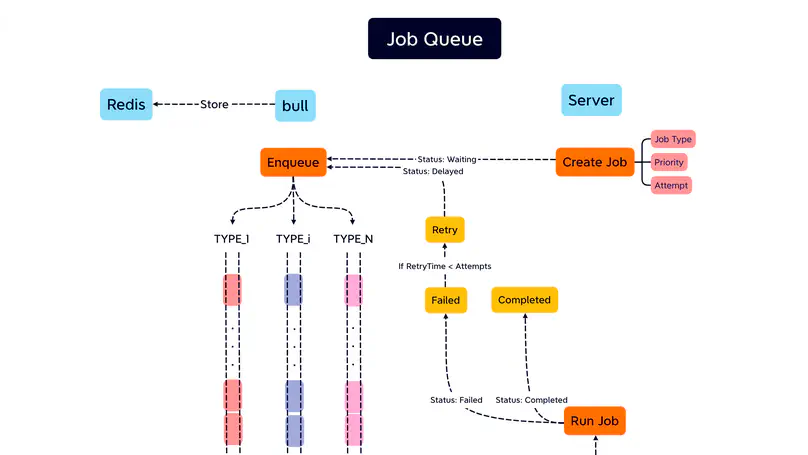
- Optimized the performance of the website by integrating a Redis job queue to process multiple tasks at the same time resulting in a 12% reduction in job failures. Enhanced user experience and engagement by integrating i18n for multilingual support, resulting in 15% more user sign-ups from non-English-speaking regions.
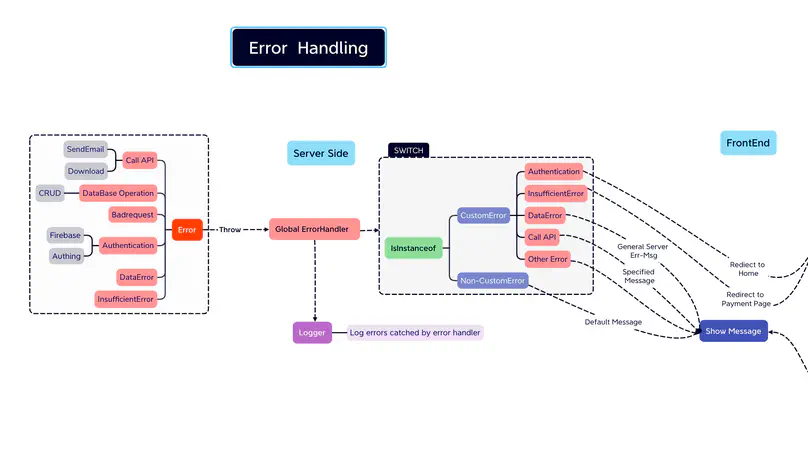
- Applied Jest for unit testing and Cypress for end-to-end testing. Established a robust error-handling framework with CI/CD pipeline logging and alert triggers, minimizing critical SEV and post-launch bug reports by 24%.
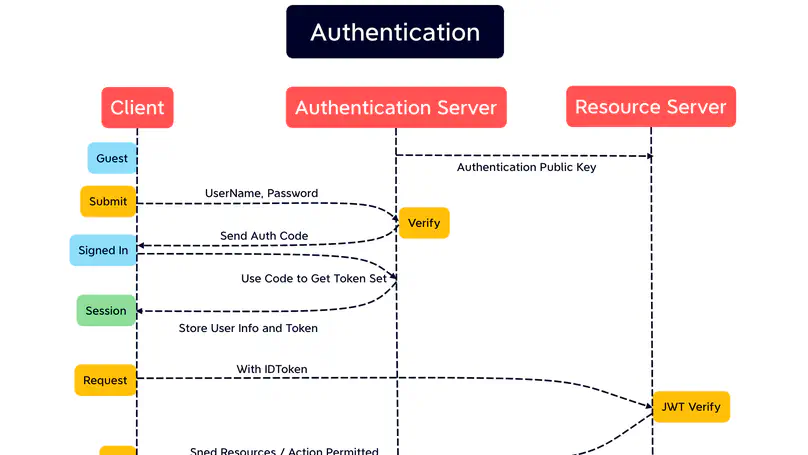
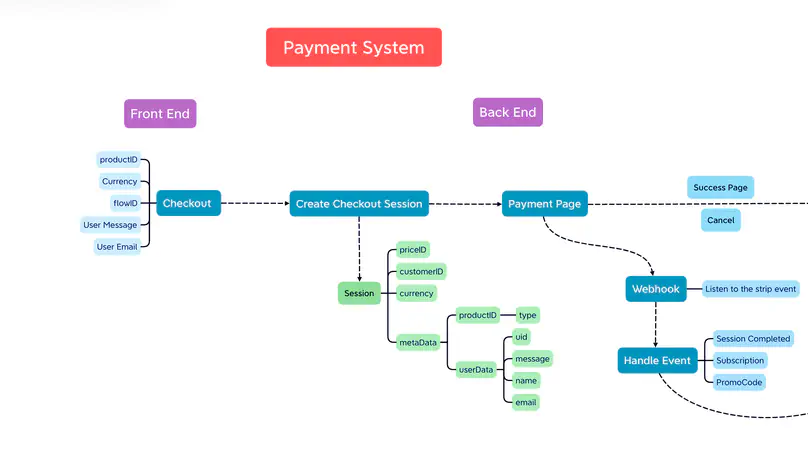
- Employed Firebase for user authentication and data store. Integrated Stripe Payment seamlessly to the points system in the web application. Implemented Search Engine Optimization (SEO), improving the website impressions and clicks by 25%.
- Developed a data management platform for a health tech startup, enabling patients to efficiently manage exercise data from our proprietary Biostabilizer machine, with added data visualization for enhanced clarity.
- Optimized the app experience by implementing Redux for consistent state management and GraphQL for data retrieval, reducing server data fetches by an average of 50%.
- Enhanced user experience by cutting initial load times by 30% through improved front-end efficiency with Webpack and lazy loading. Additionally, build custom hooks to boost code reusability and abstraction.
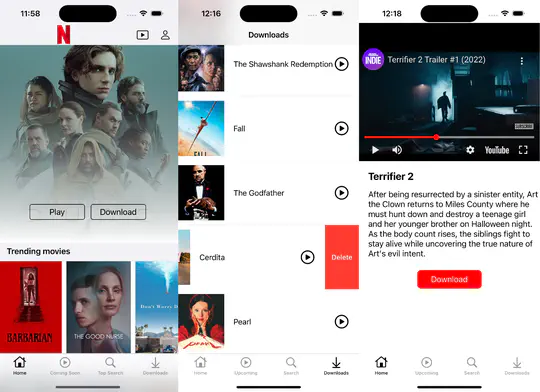
- Built a cross-platform App, CRIB, to foster roommate relationships through features such as real-time status-sharing, seamless expense splitting, and shared scheduling of house chores and responsibilities.
- Led the creation of key app pages using React Native, designed the user-friendly navigation system with React-Navigation, and established robust user authentication and database infrastructure powered by AWS Amplify.
Academic Experience
- Led the fine-tuning of DrugChat, a GPT-like AI platform for pharmaceutical queries, using a novel dataset. Achieved notable enhancements in model accuracy and response quality.
- Executed a comprehensive data pipeline: extracted drug and protein information from the Wikipedia dataset, performed meticulous data cleaning and preprocessing, and prepared data for question-answer pair generation.
- Utilized GPT-4 for generating structured question-answer pairs from the processed data. Skillfully managed API limitations by implementing a throttle mechanism during data generation.
Publications
Projects

Hornors
Gallery





















Contact
Leave me a messgae